Scarica il documento per vederlo tutto.
Scarica il documento per vederlo tutto.
Scarica il documento per vederlo tutto.
Scarica il documento per vederlo tutto.
Scarica il documento per vederlo tutto.
Scarica il documento per vederlo tutto.
vuoi
o PayPal
tutte le volte che vuoi
Qui sotto è riportato il disegno del motore con la valvola di alimentazione (in verde).
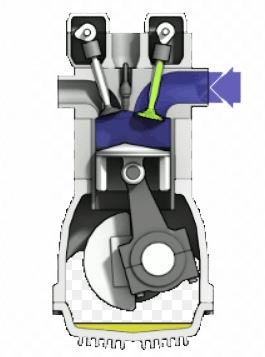
Mentre la valvola è disegnata sotto:

La valvola di alimentazione riceve alla sua estremità sinistra (sx) un flusso termico dalla camera di combustione, che si è supposto abbia una temperatura media
La valvola ha la forma di un cilindro sottile e viene schematizzata come un'asta, vale a dire un corpo monodimensionale.
L'equazione che descrive il fenomeno in forma indefinita:
è di tipo lineare parabolico e correla l'andamento della temperatura (T) lungo l'asse della valvola in funzione del tempo (t). Il termine
Risolvere l'equazione vuol dire determinare (nel nostro caso per via numerica) la funzione T (x, t) sulla base della condizione iniziale (t=0) ed al contorno alle estremità (x=0 e x= L).
Nel precedente articolo questo esempio è stato risolto approssimando le derivate parziali con uno schema molto semplice di differenze finite che si presta ad una soluzione diretta, con il metodo di Eulero esplicito. In pratica si è costruito un reticolo spazio-temporale
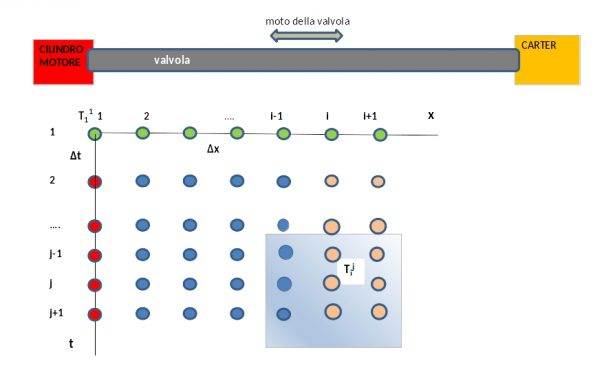
dove lo spazio è riportato in ascissa ed il tempo in ordinata. Con il metodo esplicito di Eulero si risolve ogni cella del reticolo spostandosi da sinistra a destra fino a completare le riga per passare poi alla riga temporale successiva. Il metodo, descritto in dettaglio nell'articolo citato, è molto semplice e si presta a essere facilmente usato con EXCEL, ma ha un serio problema di convergenza. Questo richiede di usare un passo temporale molto piccolo. In tal modo per ottenere la convergenza, ed anche un ragionevole precisione, è necessario costruire un reticolo di grandi dimensioni. Ciò che comporta un notevole consumo di memoria del computer ed un tempo di elaborazione abbastanza lungo.
METODO DI CRANK-NICOLSON
Per rimediare alle difficoltà di convergenza gli esperti hanno sviluppato nuovi schemi alle differenze finite per approssimare le derivate parziali evitando i problemi del metodo di Eulero. In letteratura (R2) si trovano diversi metodi, uno dei più usati è quello di due matematici statunitensi John Crank e Phyllis Nicolson (in seguito C-N) che vogliamo applicare in questo articolo. Vediamo come è fatto e come si usa.
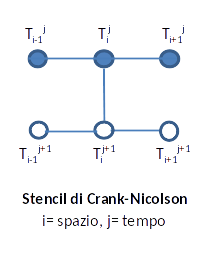
Con il metodo C-N le derivate sono approssimate come segue:
(dove: pedice = spazio, apice = tempo)
Notiamo che la derivata temporale è molto semplice (come nel metodo di Eulero esplicito) mentre la derivata spaziale è di tipo più complesso, in quanto coinvolge sei elementi del reticolo spazio-temporale, suddivisi in due gruppi di tre elementi per ogni valore temporale, che è rappresentato dal seguente schema (stencil):
L'approssimazione
Per completare lo schema risolutivo è necessario approssimare alle differenze finite anche il secondo termine al secondo membro della
Infine dobbiamo fornire la condizione iniziale:
Vale a dire:
E le condizioni al contorno, che nel nostro caso, come nell'articolo precedente, sono del tipo di Neumann (R4), vale a dire sono espresse da derivate:
Estremità sx ( lato motore) :
Estremità dx (lato carter):
Nota: sx e dx significano rispettivamente sinistra e destra.
(dove
Entrambe le condizioni al contorno traducono il principio fisico per cui il flusso termico convettivo, tra l'estremità della valvola ed il fluido che la lambisce, eguaglia il flusso termico conduttivo nel metallo alle estremità della valvola: in definitiva il principio di conservazione dell'energia.
Anche per le condizioni al contorno le derivate sono approssimate dalle loro differenze finite:
Inoltre è conveniente concentrare i parametri creandone cinque nuovi, in questo modo:
Non è irrilevante notare che tali parametri sono tutti adimensionali.
Ora le
Osserviamo che la
Analogamente si possono riscrivere e semplificare le
In definitiva le equazioni
Notiamo che la
Tuttavia a questo punto vien da pensare che la faccenda diventi complessa. Infatti è il numero di punti nel reticolo spaziale, che si ottiene dividendo la lunghezza della valvola in
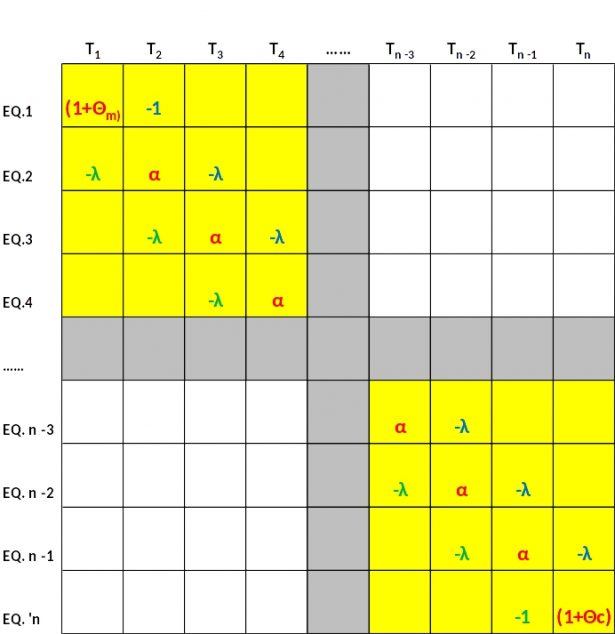
(Le temperature riportate in testa al disegno sono prive dell'apice temporale j+1, che viene sottinteso).
Notiamo che sulla diagonale principale abbiamo tutti coefficienti uguali, pari a α, tranne il primo e l'ultimo, che sono rispettivamente i coefficienti delle equazioni al contorno
In conclusione la matrice dei coefficienti del sistema è tridiagonale ed i valori delle componenti matriciali sono delle costanti, che rimangono invariate passando da una riga temporale all'altra.
La matrice dei termini noti ovviamente deve essere variabile per ogni riga temporale. È un vettore colonna il cui elemento tipico è dato in forma generale da:
Mentre i componenti
In breve il meccanismo di calcolo è facilmente intuibile: si parte dalla prima riga temporale, dove
Ora si calcolano le componenti del vettore dei termini noti usando le
Ci manca di precisare come si risolve il sistema tridiagonale: ci ha pensato il fisico e matematico Llewelynn Thomas che ha costruito un semplice algoritmo (R5). Perché esso funzioni è necessario che la diagonale della matrice dei coefficienti sia strettamente dominante per righe, ciò che si verifica nel nostro problema.
Le equazioni del modello sono state incorporate in un semplice codice VBA che contiene la routine dell'algoritmo di Thomas. Il codice è stato usato per simulare il comportamento della valvola a partire dalla condizione iniziale per diverse dimensioni del reticolo. Converge sempre perfettamente.
La simulazione più precisa ottenuta con il modello ha richiesto un reticolo
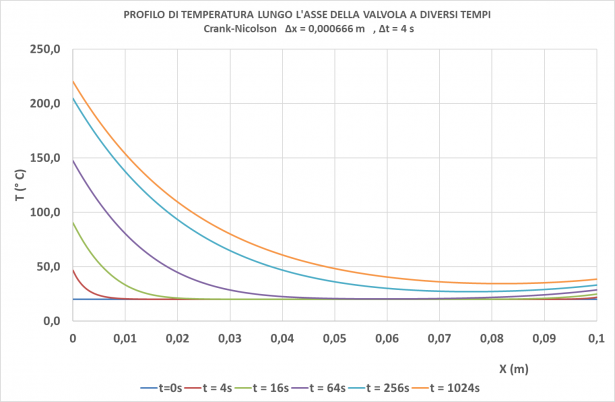
Riproponiamo sotto il diagramma da articolo precedente (R1), risolto con metodo di Eulero esplicito:
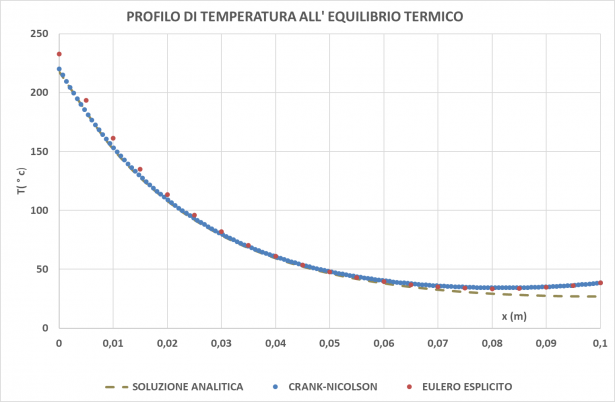
Si nota che i profili di Eulero e C-N sono abbastanza vicini, tuttavia all'estremità sx C-N è molto più preciso di Eulero, mentre all'estremità dx i due metodi sono quasi coincidenti e sovrastimano di circa 9 °C la soluzione esatta. Complessivamente C-N è più preciso di Eulero, ha richiesto un reticolo enormemente più piccolo (38 mila contro 768 mila punti) e tempo di elaborazione molto inferiore. Si può concludere che è sicuramente preferibile.
Il codice VBA e tutti i dati, parametri, calcoli, diagrammi, sono riportati nel file EXCEL associato all'articolo.
APPENDICE-SOLUZIONE ANALITICA ALL'EQUILIBRIO TERMICO
All'equilibrio termico, che in teoria si raggiungerebbe dopo un tempo infinito, l'equazione
Questo vuol dire che scompare la variabile tempo. Il modello si semplifica e la derivata spaziale non è più parziale:
Che è del tipo:
È questa una equazione differenziale lineare del secondo ordine la cui soluzione è:
Si impongono ora le condizioni al contorno di Neumann:
Estremità sx, x=0:
Estremità dx, X =L:
In questo modo si ottiene un sistema lineare (2 \times 2) nelle variabili
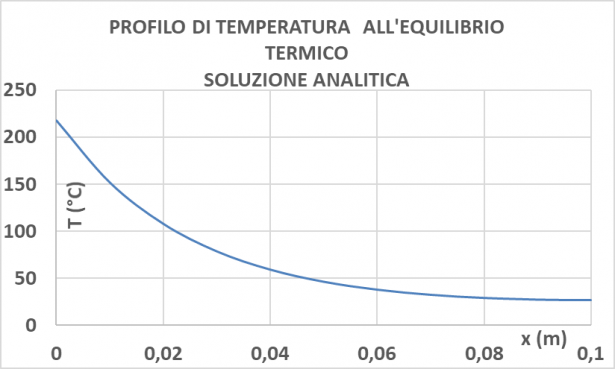
Il profilo di temperatura, riportato nel diagramma sopra, sembra di tendenza asintotica, ma si tratta di un inganno visivo. Nella realtà esiste un minimo relativo, situato a circa 0,1 mm dall'estremità dx della valvola. Il significato fisico del fenomeno è semplice da capire: il flusso in controcorrrente della miscela in alimentazione raffredda la valvola a temperature inferiori a 30°C. Tuttavia la valvola all'estremità dx è in contatto con l'olio caldo del carter (
RIFERIMENTI
- (R1) https://www.skuola.net/matematica/pde-soluzione-un-problema-metodo-delle-differenze-finite.html
- (R2) http://sharif.ir/~moosavi/Myint-U_Debnath-Linear_Partial_Differential_Equations_for_Scientists_and_Engineers.pdf (metodi vari PDE)
- (R3) Crank, J. and Nicholson, P., A practical method for numerical evaluation of solutions of partial differential equations of the heat conduction type, Proc. Camb. Phil. Soc. 43 (1947) 50-67.
- (R4) http://www.dmmm.uniroma1.it/~daniele.andreucci/pdf/20081215_corso_edp.pdf (condizione di Neumann)
- (R5) https://www.uni-muenster.de/imperia/md/content/physik_tp/lectures/ws2016-2017/num_methods_i/appendix.pdf (algoritmo di Thomas)
525 312,3 129,4 62,7 43,5 51,4
530 312,4 129,5 62,8 43,6 51,5
535 312,5 129,6 62,9 43,6 51,6
540 312,5 129,7 63,0 43,7 51,6
545 312,6 129,7 63,1 43,8 51,7
550 312,7 129,8 63,1 43,9 51,7
555 312,7 129,9 63,2 43,9 51,8
560 312,8 130,0 63,3 44,0 51,8
565 312,9 130,1 63,4 44,0 51,9
570 312,9 130,1 63,4 44,1 51,9
575 313,0 130,2 63,5 44,2 52,0
580 313,0 130,3 63,6 44,2 52,0
585 313,1 130,3 63,6 44,3 52,0
590 313,1 130,4 63,7 44,3 52,1
595 313,2 130,5 63,7 44,4 52,1
600 313,3 130,5 63,8 44,4 52,2
605 313,3 130,6 63,9 44,5 52,2
610 313,3 130,6 63,9 44,5 52,2
615 313,4 130,7 64,0 44,6 52,3
620 313,4 130,7 64,0 44,6 52,3
625 313,5 130,8 64,1 44,7 52,3
630 313,5 130,8 64,1 44,7 52,4
635 313,6 130,9 64,2 44,8 52,4
640 313,6 130,9 64,2 44,8 52,4
645 313,6 131,0 64,3 44,8 52,5
650 313,7 131,0 64,3 44,9 52,5
655 313,7 131,1 64,4 44,9 52,5
660 313,8 131,1 64,4 44,9 52,6
665 313,8 131,2 64,4 45,0 52,6
670 313,8 131,2 64,5 45,0 52,6
675 313,9 131,2 64,5 45,0 52,6
680 313,9 131,3 64,5 45,1 52,7
685 313,9 131,3 64,6 45,1 52,7
690 313,9 131,3 64,6 45,1 52,7
695 314,0 131,4 64,7 45,2 52,7
700 314,0 131,4 64,7 45,2 52,8
705 314,0 131,4 64,7 45,2 52,8
710 314,1 131,5 64,7 45,3 52,8
715 314,1 131,5 64,8 45,3 52,8
720 314,1 131,5 64,8 45,3 52,9
725 314,1 131,6 64,8 45,3 52,9
730 314,1 131,6 64,9 45,4 52,9
735 314,2 131,6 64,9 45,4 52,9
740 314,2 131,6 64,9 45,4 52,9
745 314,2 131,7 64,9 45,4 52,9
750 314,2 131,7 65,0 45,5 53,0
755 314,3 131,7 65,0 45,5 53,0
760 314,3 131,7 65,0 45,5 53,0
765 314,3 131,8 65,0 45,5 53,0
770 314,3 131,8 65,1 45,5 53,0
775 314,3 131,8 65,1 45,6 53,0
780 314,3 131,8 65,1 45,6 53,1
785 314,4 131,8 65,1 45,6 53,1
790 314,4 131,9 65,1 45,6 53,1
795 314,4 131,9 65,2 45,6 53,1
800 314,4 131,9 65,2 45,6 53,1
805 314,4 131,9 65,2 45,7 53,1
810 314,4 131,9 65,2 45,7 53,1
815 314,4 131,9 65,2 45,7 53,1
820 314,5 132,0 65,2 45,7 53,2
825 314,5 132,0 65,3 45,7 53,2
830 314,5 132,0 65,3 45,7 53,2
835 314,5 132,0 65,3 45,7 53,2
840 314,5 132,0 65,3 45,8 53,2
845 314,5 132,0 65,3 45,8 53,2
850 314,5 132,0 65,3 45,8 53,2
855 314,5 132,1 65,3 45,8 53,2
860 314,6 132,1 65,4 45,8 53,2
865 314,6 132,1 65,4 45,8 53,2
870 314,6 132,1 65,4 45,8 53,3
875 314,6 132,1 65,4 45,8 53,3
880 314,6 132,1 65,4 45,8 53,3
885 314,6 132,1 65,4 45,9 53,3
890 314,6 132,1 65,4 45,9 53,3
895 314,6 132,1 65,4 45,9 53,3
900 314,6 132,2 65,4 45,9 53,3
905 314,6 132,2 65,5 45,9 53,3
910 314,6 132,2 65,5 45,9 53,3
915 314,7 132,2 65,5 45,9 53,3
920 314,7 132,2 65,5 45,9 53,3
925 314,7 132,2 65,5 45,9 53,3
930 314,7 132,2 65,5 45,9 53,3
935 314,7 132,2 65,5 45,9 53,3
940 314,7 132,2 65,5 45,9 53,3
945 314,7 132,2 65,5 46,0 53,4
950 314,7 132,2 65,5 46,0 53,4
955 314,7 132,2 65,5 46,0 53,4
960 314,7 132,3 65,5 46,0 53,4
965 314,7 132,3 65,6 46,0 53,4
970 314,7 132,3 65,6 46,0 53,4
975 314,7 132,3 65,6 46,0 53,4
980 314,7 132,3 65,6 46,0 53,4
985 314,7 132,3 65,6 46,0 53,4
990 314,7 132,3 65,6 46,0 53,4
995 314,7 132,3 65,6 46,0 53,4
1000 314,8 132,3 65,6 46,0 53,4
1005 314,8 132,3 65,6 46,0 53,4
1010 314,8 132,3 65,6 46,0 53,4
1015 314,8 132,3 65,6 46,0 53,4
1020 314,8 132,3 65,6 46,0 53,4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
VALVOLA DI MOTORE A SCOPPIO
ELABORAZIONE CON METODO CRANK-NICOLSON E MATRICE TRIDIAGONALE
DATI CALCOLO COSTANTI E PARAMETRI
0,005263157895
m ALFA TETAC TETAM
L 0,1 m lunghezza valvola 5 ∆x
d 0,009 m diametro valvola 6 Nt 1024 adimensionale numero punti reticolo temporale ( arrot.) 1,122155633 0,05847953216 0,03898635478
Nx 20 adim numero punti reticolo x 7 D = K/(ρc) 3,24E-06 m^2/s diffusività termica
1024 s durata temporale integrazione 8 G = 4γa/(ρcd) 5,33E-03 1/s convettività laterale
τ 1,0 s passo temporale 9 μ = G∆t 5,33E-03 adimensionale parametro
∆t
T0 20 °C temperatura iniziale della valvola 10 = 5,85E-02 adimensionale coefficiente termico lato carter
θc γc*∆x/K
Ta 20 °C temperatura miscela alimentazione 11 = 3,90E-02 adimensionale coefficiente termico lato cilindro motore
θm γm*∆x/K
Tm 1300 °C temperatura media gas nel cilindro 12 = 0,5*D*Δt/(Δx)^2 5,84E-02 adimensionale parametro CN tridiagonale
λ
Tc 80 °C temperatura olio nel carter distribuzione 13 = 1 + 2λ + μ 1,12E+00 adimensionale parametro CN tridiagonale
α
50 W/(m^2*°K)coefficiente scambio convettivo valvola-miscela alimentazione 14
γa 100 W/(m^2*°K)coefficiente scambio convettivo valvola cilindro motore 15
γm 150 W/(m^2*°K)coefficiente scambio convettivo valvola olio carter distribuzione 16
γc 8100 kg/m^3 densità valvola 17
ρ
K 13,5 W/(m*°K) conduttività valvola 18
c 515 W*s/(kg*°K)calore specifico a p costante valvola 19
Andamento della temperatura in funzione della ascissa x e del tempo t
i 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
x (m) 0 0,005 0,011 0,016 0,021 0,026 0,032 0,037 0,042 0,047 0,053 0,058 0,063 0,068 0,074 0,079 0,084 0,089 0,095 0,100
t (s) j Tc sfera
0,00 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20 20
2,00 70,57 22,64 20,14 20,01 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,01 20,18 23,49
3,00 75,38 27,63 20,65 20,05 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,04 20,53 23,81
4,00 79,69 32,11 21,55 20,15 20,01 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,01 20,11 20,83 24,10
5,00 83,59 36,17 22,72 20,34 20,04 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,02 20,19 21,11 24,37
6,00 87,17 39,89 24,06 20,63 20,08 20,01 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,01 20,04 20,28 21,37 24,61
7,00 90,47 43,32 25,53 21,01 20,15 20,02 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,01 20,07 20,38 21,60 24,83
8,00 93,54 46,50 27,08 21,47 20,25 20,04 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,02 20,10 20,49 21,82 25,03
9,00 96,41 49,48 28,67 22,01 20,38 20,06 20,01 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,03 20,14 20,60 22,02 25,22
10,00 99,11 52,29 30,28 22,62 20,55 20,10 20,02 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,01 20,04 20,18 20,71 22,21 25,40
11,00 101,65 54,93 31,89 23,28 20,75 20,15 20,03 20,00 20,00 20,00 20,00 20,00 20,00 20,00 20,01 20,05 20,23 20,82 22,39 25,57
12,00 104,07 57,44 33,51 23,99 20,99 20,21 20,04 20,01 20,00 20,00 20,00 20,00 20,00 20,00 20,01 20,07 20,27 20,93 22,56 25,74
13,00 106,37 59,83 35,11 24,75 21,26 20,29 20,06 20,01 20,00 20,00 20,00 20,00 20,00 20,00 20,02 20,09 20,33 21,04 22,72 25,89
14,00 108,56 62,11 36,69 25,54 21,56 20,38 20,08 20,02 20,00 20,00 20,00 20,00 20,00 20,01 20,03 20,11 20,38 21,14 22,88 26,03
15,00 110,66 64,29 38,25 26,36 21,89 20,49 20,11 20,02 20,00 20,00 20,00 20,00 20,00 20,01 20,03 20,13 20,44 21,25 23,02 26,17
16,00 112,67 66,38 39,79 27,20 22,25 20,61 20,15 20,03 20,01 20,00 20,00 20,00 20,00 20,01 20,04 20,15 20,49 21,35 23,17 26,31
17,00 114,60 68,39 41,31 28,06 22,64 20,76 20,19 20,04 20,01 20,00 20,00 20,00 20,00 20,01 20,05 20,18 20,55 21,46 23,30 26,43
18,00 116,47 70,33 42,79 28,94 23,05 20,91 20,24 20,06 20,01 20,00 20,00 20,00 20,00 20,02 20,06 20,21 20,61 21,56 23,43 26,56
19,00 118,27 72,19 44,25 29,82 23,48 21,09 20,30 20,08 20,02 20,00 20,00 20,00 20,01 20,02 20,07 20,24 20,67 21,66 23,56 26,67
20,00 120,00 74,00 45,68 30,72 23,93 21,28 20,37 20,10 20,02 20,01 20,00 20,00 20,01 20,03 20,09 20,27 20,73 21,75 23,68 26,79
21,00 121,68 75,74 47,09 31,61 24,40 21,48 20,45 20,12 20,03 20,01 20,00 20,00 20,01 20,03 20,10 20,30 20,79 21,85 23,79 26,90
22,00 123,31 77,44 48,47 32,52 24,89 21,70 20,53 20,15 20,04 20,01 20,00 20,00 20,01 20,04 20,12 20,33 20,86 21,94 23,91 27,01
23,00 124,89 79,08 49,82 33,42 25,38 21,93 20,62 20,18 20,05 20,01 20,00 20,00 20,01 20,04 20,13 20,37 20,92 22,03 24,02 27,11
24,00 126,42 80,67 51,15 34,32 25,90 22,18 20,73 20,22 20,06 20,02 20,00 20,00 20,02 20,05 20,15 20,40 20,98 22,12 24,12 27,21
25,00 127,91 82,22 52,45 35,22 26,42 22,44 20,84 20,26 20,07 20,02 20,01 20,01 20,02 20,06 20,17 20,44 21,04 22,21 24,23 27,31
26,00 129,36 83,72 53,73 36,12 26,95 22,71 20,96 20,31 20,09 20,03 20,01 20,01 20,02 20,07 20,19 20,47 21,10 22,30 24,33 27,40
27,00 130,77 85,19 54,98 37,02 27,49 22,99 21,08 20,36 20,11 20,03 20,01 20,01 20,03 20,07 20,20 20,51 21,16 22,38 24,42 27,49
28,00 132,14 86,61 56,21 37,91 28,04 23,28 21,22 20,41 20,13 20,04 20,01 20,01 20,03 20,08 20,22 20,55 21,22 22,46 24,52 27,58
29,00 133,48 88,00 57,41 38,79 28,60 23,58 21,36 20,48 20,15 20,05 20,02 20,01 20,03 20,09 20,24 20,59 21,28 22,54 24,61 27,67
30,00 134,79 89,36 58,60 39,67 29,16 23,89 21,52 20,54 20,18 20,06 20,02 20,02 20,04 20,10 20,27 20,62 21,34 22,62 24,70 27,76
31,00 136,06 90,68 59,76 40,54 29,72 24,21 21,67 20,61 20,21 20,07 20,02 20,02 20,04 20,11 20,29 20,66 21,40 22,70 24,79 27,84
32,00 137,31 91,98 60,90 41,41 30,29 24,54 21,84 20,69 20,24 20,08 20,03 20,02 20,05 20,13 20,31 20,70 21,46 22,78 24,87 27,92
33,00 138,52 93,24 62,03 42,27 30,86 24,88 22,02 20,77 20,27 20,09 20,03 20,03 20,05 20,14 20,33 20,74 21,51 22,85 24,96 28,00
34,00 139,71 94,48 63,13 43,12 31,44 25,22 22,20 20,85 20,31 20,11 20,04 20,03 20,06 20,15 20,36 20,78 21,57 22,93 25,04 28,08
35,00 140,88 95,69 64,21 43,96 32,01 25,57 22,38 20,94 20,35 20,12 20,05 20,04 20,07 20,16 20,38 20,82 21,63 23,00 25,12 28,15
36,00 142,02 96,87 65,28 44,80 32,59 25,92 22,58 21,04 20,39 20,14 20,05 20,04 20,08 20,18 20,40 20,86 21,68 23,07 25,20 28,23
37,00 143,13 98,03 66,32 45,63 33,17 26,28 22,78 21,14 20,44 20,16 20,06 20,05 20,08 20,19 20,43 20,90 21,74 23,14 25,27 28,30
38,00 144,22 99,16 67,35 46,45 33,75 26,64 22,98 21,25 20,49 20,18 20,07 20,05 20,09 20,21 20,45 20,94 21,80 23,21 25,35 28,37
39,00 145,29 100,27 68,36 47,26 34,33 27,01 23,19 21,35 20,54 20,20 20,08 20,06 20,10 20,22 20,48 20,97 21,85 23,27 25,42 28,44
40,00 146,34 101,36 69,36 48,06 34,90 27,38 23,41 21,47 20,59 20,23 20,09 20,07 20,11 20,23 20,50 21,01 21,90 23,34 25,49 28,50
41,00 147,37 102,43 70,33 48,86 35,48 27,76 23,63 21,59 20,65 20,25 20,11 20,07 20,12 20,25 20,53 21,05 21,96 23,41 25,56 28,57
42,00 148,38 103,48 71,30 49,64 36,06 28,14 23,86 21,71 20,71 20,28 20,12 20,08 20,13 20,27 20,55 21,09 22,01 23,47 25,63 28,64
43,00 149,37 104,51 72,24 50,42 36,63 28,52 24,09 21,84 20,78 20,31 20,13 20,09 20,14 20,28 20,58 21,13 22,06 23,53 25,70 28,70
44,00 150,34 105,52 73,17 51,19 37,20 28,90 24,32 21,97 20,84 20,35 20,15 20,10 20,15 20,30 20,61 21,17 22,11 23,59 25,77 28,76
45,00 151,29 106,51 74,09 51,95 37,77 29,29 24,56 22,10 20,91 20,38 20,17 20,11 20,16 20,32 20,63 21,21 22,16 23,66 25,83 28,82
46,00 152,23 107,48 74,99 52,71 38,34 29,68 24,80 22,24 20,99 20,42 20,19 20,13 20,17 20,33 20,66 21,25 22,21 23,72 25,89 28,88
47,00 153,15 108,44 75,88 53,45 38,91 30,07 25,05 22,38 21,06 20,45 20,20 20,14 20,19 20,35 20,69 21,28 22,26 23,77 25,96 28,94
48,00 154,05 109,37 76,76 54,19 39,47 30,46 25,30 22,53 21,14 20,49 20,23 20,15 20,20 20,37 20,71 21,32 22,31 23,83 26,02 29,00
49,00 154,94 110,30 77,62 54,92 40,03 30,85 25,55 22,68 21,22 20,54 20,25 20,16 20,21 20,39 20,74 21,36 22,36 23,89 26,08 29,06
50,00 155,81 111,20 78,47 55,64 40,59 31,25 25,81 22,83 21,31 20,58 20,27 20,18 20,23 20,41 20,77 21,40 22,41 23,95 26,14 29,11
51,00 156,67 112,10 79,31 56,35 41,14 31,64 26,06 22,99 21,39 20,63 20,30 20,19 20,24 20,43 20,79 21,43 22,46 24,00 26,20 29,17
52,00 157,51 112,97 80,13 57,06 41,69 32,04 26,32 23,14 21,48 20,68 20,32 20,21 20,26 20,44 20,82 21,47 22,51 24,05 26,25 29,22
53,00 158,34 113,83 80,94 57,76 42,24 32,43 26,59 23,31 21,58 20,73 20,35 20,23 20,27 20,46 20,85 21,51 22,55 24,11 26,31 29,28
54,00 159,16 114,68 81,75 58,45 42,79 32,83 26,85 23,47 21,67 20,78 20,38 20,25 20,29 20,48 20,88 21,54 22,60 24,16 26,36 29,33
55,00 159,96 115,52 82,53 59,13 43,33 33,22 27,12 23,64 21,77 20,83 20,41 20,27 20,30 20,50 20,90 21,58 22,64 24,21 26,42 29,38
56,00 160,75 116,34 83,31 59,80 43,87 33,62 27,39 23,81 21,87 20,89 20,44 20,29 20,32 20,53 20,93 21,62 22,69 24,26 26,47 29,43
57,00 161,53 117,15 84,08 60,47 44,40 34,02 27,66 23,98 21,97 20,95 20,47 20,31 20,34 20,55 20,96 21,65 22,73 24,32 26,52 29,48
