
In questa sezione mostreremo l'uso di Mathcad nello studio delle trasformazioni geometriche applicate alle figure piane. In particolare, vedremo le isometrie applicate ai movimenti rigidi delle figure piane. Useremo degli esempi per illustrare tali concetti.
Ogni isometria può essere considerata composta da tre tipi di trasformazioni elementari: Traslazioni, Rotazioni intorno all'origine e Simmetrie rispetto all'asse x .
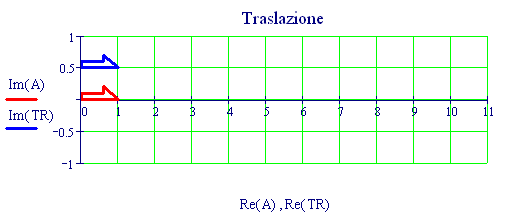
La Traslazione di un poligono, i cui vertici sono rappresentati da un vettore complesso, si può ottenere come somma di un vettore complesso e di un numero complesso. Mathcad si rivela molto utile nel sommare un numero complesso ad un vettore in quanto somma ad ogni componente del vettore il numero dato. Per R uotare un poligono di un angolo v intorno all'origine basta moltiplicare il vettore complesso, i cui elementi rappresentano i vertici del poligono, per v. Per la simmetria di un vettore A rispetto all'asse x basta considerare i complessi coniugati dei vertici del poligono dato.
![]()
![]()
![]()
Per vedere l'animazione clicca sul grafico seguente
In questa sezione mostreremo l'uso di Mathcad nello studio delle trasformazioni geometriche applicate alle figure piane. In particolare, vedremo le isometrie applicate ai movimenti rigidi delle figure piane. Useremo degli esempi per illustrare tali concetti.
Ogni isometria può essere considerata composta da tre tipi di trasformazioni elementari: Traslazioni, Rotazioni intorno all'origine e Simmetrie rispetto all'asse x .
La Traslazione di un poligono, i cui vertici sono rappresentati da un vettore complesso, si può ottenere come somma di un vettore complesso e di un numero complesso. Mathcad si rivela molto utile nel sommare un numero complesso ad un vettore in quanto somma ad ogni componente del vettore il numero dato. Per R uotare un poligono di un angolo v intorno all'origine basta moltiplicare il vettore complesso, i cui elementi rappresentano i vertici del poligono, per v. Per la simmetria di un vettore A rispetto all'asse x basta considerare i complessi coniugati dei vertici del poligono dato.
![]()
![]()
![]()
Per vedere l'animazione clicca sul grafico seguente

![]()
Per le rotazioni intorno all'origine del poligono individuato dal vettore A si procede nel modo seguente:
![]()
![]()
Per vedere l'animazione clicca sul grafico seguente
![]()
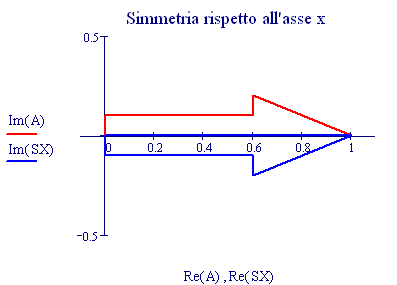
Per la simmetria rispetto all'asse x basta considerare il vettore avente come elementi i complessi coniugati degli elementi del vettore A . Pertanto basta considerare il seguente vettore e rappresentarlo
![]()
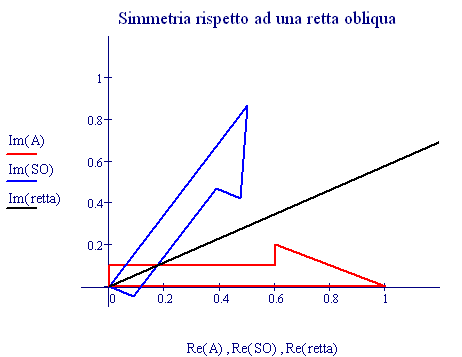
Per la simmetria rispetto ad una retta obliqua, passante per l'origine, basta considerare la trasformazione seguente:
Per una simmetria rispetto ad una retta, passante per l'origine degli assi ed inclinata di 30 gradi rispetto all'asse x, bisogna considerare i vettori seguenti :
![]()
![]()
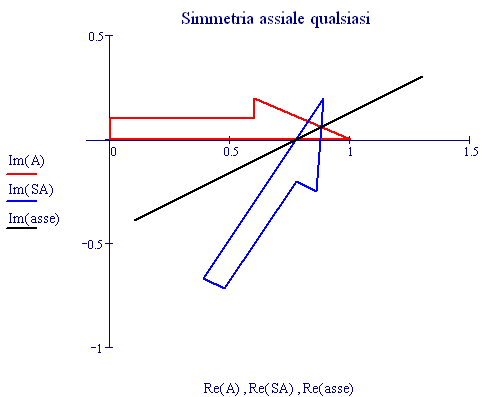
Per la simmetria rispetto ad una retta obliqua qualsiasi, non passante per l'origine, basta considerare la trasformazione seguente:
Per una simmetria rispetto ad una retta, non passante per l'origine degli assi ed inclinata di 30 gradi rispetto all'asse x, bisogna considerare i vettori seguenti:
![]()
![]()
![]()
Per le rotazioni intorno all'origine del poligono individuato dal vettore A si procede nel modo seguente:
![]()
![]()
Per vedere l'animazione clicca sul grafico seguente
![]()
Per la simmetria rispetto all'asse x basta considerare il vettore avente come elementi i complessi coniugati degli elementi del vettore A . Pertanto basta considerare il seguente vettore e rappresentarlo
![]()
Per la simmetria rispetto ad una retta obliqua, passante per l'origine, basta considerare la trasformazione seguente:
Per una simmetria rispetto ad una retta, passante per l'origine degli assi ed inclinata di 30 gradi rispetto all'asse x, bisogna considerare i vettori seguenti :
![]()
![]()
Per la simmetria rispetto ad una retta obliqua qualsiasi, non passante per l'origine, basta considerare la trasformazione seguente:
[url=https://www.skuola.net/informatica/isometrie-piane.html]
Per una simmetria rispetto ad una retta, non passante per l'origine degli assi ed inclinata di 30 gradi rispetto all'asse x, bisogna considerare i vettori seguenti:
![]()
![]()

