Trattandosi di una
struttura 1-iperstatica si rende necessario considerare una
struttura isostatica associata ed io ho optato per declassare l'incastro \(A\) in una cerniera introducendo quindi una coppia incognita \(X\). Da qui in poi è tutto meccanico, si fa sempre al solito modo. Nella fattispecie, si prende un martello e si spaccano tutti i vincoli, interni od esterni che siano, non importa. Quindi, si introducono le rispettive reazioni vincolari:
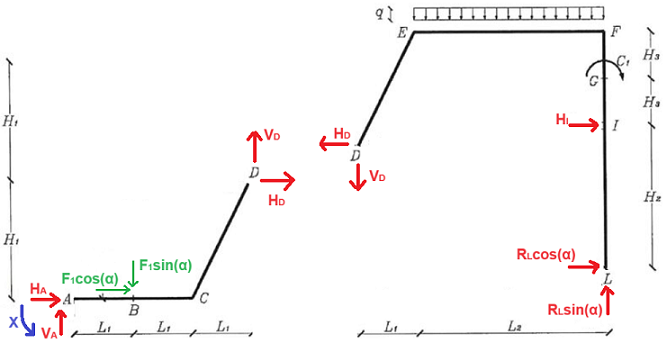
dove i versi, al solito, si ipotizzano a piacere e solamente a conti fatti si scoprirà se sono corretti (reazione positiva) o scorretti (reazione negativa), quindi si impone l'
equilibrio di entrambi i corpi, ottenendo un sistema di 6 equazioni lineari in 6 incognite (in questa fase della risoluzione \(X\) è un parametro): \[
\begin{cases}
H_A + F_1\cos\alpha + H_D = 0 \\
V_A - F_1\sin\alpha + V_D = 0 \\
X - F_1\sin\alpha\,(L_1) - H_D(H_1) + V_D(3L_1) = 0 \\
\\
-H_D+H_I+R_L\cos\alpha = 0 \\
-V_D-qL_2 + R_L\sin\alpha = 0 \\
H_D(H_1) + V_D(L_1+L_2) + qL_2(L_2/2) - H_I(H_2) - C_1 = 0 \\
\end{cases}
\] Come già sottolineato prima, per risolvere serenamente tale sistema
a mano è necessario parametrizzare lunghezze, forze e coppie con solo un paio di parametri, ad esempio \(L\) e \(q\), altrimenti si fa presto Natale!
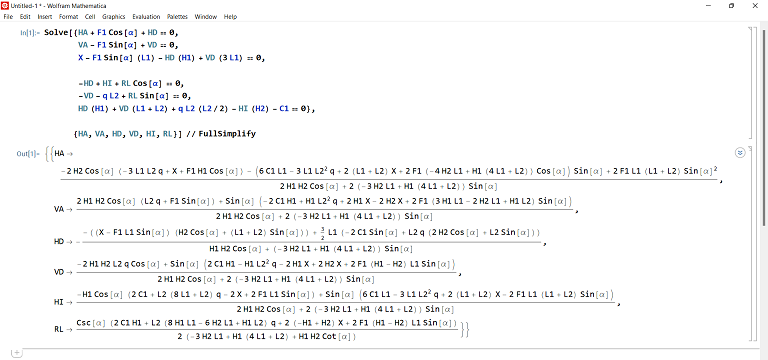
Note le reazioni vincolari (dipendenti da \(X\)), risulta possibile determinare le sollecitazioni interne \(N, T, M\) in ogni tratto della struttura, che naturalmente dipenderanno anch'esse da \(X\). Poi, imponendo la
congruenza, ossia un'equazione in cui si richiede che la rotazione di \(A\) sia nulla (lì c'era un incastro!), ed in questo il
teorema di Castigliano è quanto di meglio si possa disporre, si determina anche \(X\). Quindi, sostituendo tale valore in \(N, T, M\) si ottengono le rispettive funzioni che potranno essere finalmente diagrammate.




